生物通过自发的相互作用可以实现集群行为,比如细菌可以通过释放化学物质作为信号表明自己的存在。科学家从中受到启发,用可以发出衰减性光亮的趋光性机器人,通过控制机器人感知信号和作出反应之间的时间间隔,实现个体和群体长期的行为,比如分散、聚集和集群行为。其中,延时可以用来改变机器人对感知到的光强作出反应时的排斥速度。该项研究未来可以用于大规模的活性个体的集群行为控制,例如无人机三维飞行控制等。
原文标题:Engineering Sensorial Delay to Control Phototaxis and Emergent Collective Behaviors
2016年1月29日发表在PHYSICAL REVIEW X
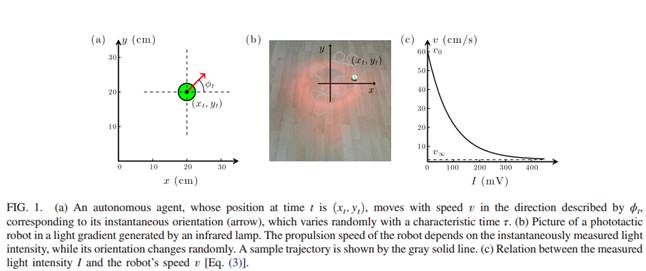
摘要:Collective motions emerging from the interaction of autonomous mobile individuals play a key role in many phenomena, from the growth of bacterial colonies to the coordination of robotic swarms. For these collective behaviors to take hold, the individuals must be able to emit, sense, and react to signals. When dealing with simple organisms and robots, these signals are necessarily very elementary; e.g., a cell might signal its presence by releasing chemicals and a robot by shining light. An additional challenge arises because the motion of the individuals is often noisy; e.g., the orientation of cells can be altered by Brownian motion and that of robots by an uneven terrain. Therefore, the emphasis is on achieving complex and tunable behaviors from simple autonomous agents communicating with each other in robust ways. Here, we show that the delay between sensing and reacting to a signal can determine the individual and collective long-term behavior of autonomous agents whose motion is intrinsically noisy. We experimentally demonstrate that the collective behavior of a group of phototactic robots capable of emitting a radially decaying light field can be tuned from segregation to aggregation and clustering by controlling the delay with which they change their propulsion speed in response to the light intensity they measure. We track this transition to the underlying dynamics of this system, in particular, to the ratio between the robots’ sensorial delay time and the characteristic time of the robots’ random reorientation. Supported by numerics, we discuss how the same mechanism can be applied to control active agents, e.g., airborne drones, moving in a three-dimensional space. Given the simplicity of this mechanism, the engineering of sensorial delay provides a potentially powerful tool to engineer and dynamically tune the behavior of large ensembles of autonomous mobile agents; furthermore, this mechanism might already be at work within living organisms such as chemotactic cells.
原文链接:http://yoksis.bilkent.edu.tr/pdf/files/12654.pdf
邮箱:sss@bnu.edu.cn 邮编:100875 地址:北京市海淀区新街口外大街19号 学院联系电话:(010)58807880
bat·365(中文)官方网站(官方)EuroCup/下单平台 版权所有

院微信公众号

BNU系统学工