研究成果: Chen Zhao, An Zeng, Rui Jiang, Zhengzhong Yuan, and Wen-Xu Wang
Phys. Rev. E 96, 012314 – Published 17 July 2017
简介: 探索复杂网络的最终目的是为了控制网络。为此复杂网络的可控性得到了深入的研究。尽管关于网络拓扑结构对其可控性的影响的科学研究最近有所进展,但目前仍然缺乏对网络拓扑结构与动力学过程的协同作用对网络可控性影响的全面了解。在这里,我们探讨流守恒网络的可控性,尝试确定可以将网络引导到任何状态所需的最小数量的驱动程序节点值。我们提出了一种基于精确可控性理论分析流网络可控性的方法,将已有对邻接矩阵分析的方法转换为对拉普拉斯矩阵的分析。有了这个框架,我们系统地研究了网络的一些关键因素对这些网络的可控性的影响,这些关键因素包括链路密度,链路方向性和正负链路。我们还得到了近似研究网络结构特性的分析方程并设计了有效的工具。最后,我们还考虑一些具有流动动力学的真实网络,发现它们的可控性与仅考虑拓扑结构预测的可控性显著不同。这些发现加深了我们对流守恒动力学过程的网络可控性的理解,并提供了一个结合网络真实动力学过程的网络可控性分析的总体框架。
Abstract
The ultimate goal of exploring complex networks is to control them. As such, controllability of complex networks has been intensively investigated. Despite recent advances in studying the impact of a network's topology on its controllability, a comprehensive understanding of the synergistic impact of network topology and dynamics on controllability is still lacking. Here, we explore the controllability of flow-conservation networks, trying to identify the minimal number of driver nodes that can guide the network to any desirable state. We develop a method to analyze the controllability on flow-conservation networks based on exact controllability theory, transforming the original analysis on adjacency matrix to Laplacian matrix. With this framework, we systematically investigate the impact of some key factors of networks, including link density, link directionality, and link polarity, on the controllability of these networks. We also obtain the analytical equations by investigating the network's structural properties approximatively and design the efficient tools. Finally, we consider some real networks with flow dynamics, finding that their controllability is significantly different from that predicted by only considering the topology. These findings deepen our understanding of network controllability with flow-conservation dynamics and provide a general framework to incorporate real dynamics in the analysis of network controllability.
原文链接:https://journals.aps.org/pre/abstract/10.1103/PhysRevE.96.012314
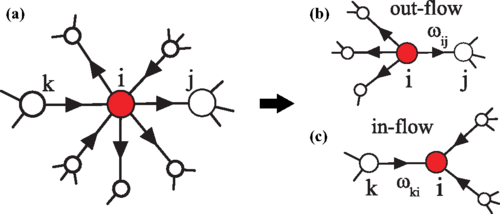
Figure 1
Illustration of flow-conservation networked systems. (a) A node i and its neighbors in a flow-conservation network. (b) The total outflow from node i to its neighbors. (c) The total inflow from i's neighbors to i. The amount of flow between two nodes depends on the weight of the corresponding link. The total flow in the network is viewed as a constant.
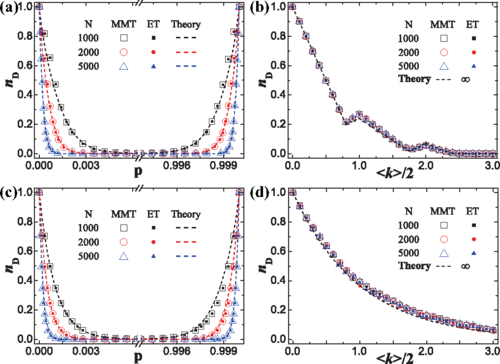
Figure 2
Controllability measure nD in undirected and directed networks with different network size N for FC-ER networks (a), (c) and FC-SF networks (b), (d). nD as a function of ⟨k⟩ is shown in the undirected situation (a),(b) and the directed situation (c),(d), with three different network sizes, N=1000,N=2000, and N=5000, respectively. MMT denotes the results obtained from the exact controllability theory (ECT). The results of the efficient tool (ET) are obtained from the fast algorithm, nETD=max {1/N, rank (W)/N}, for sparse networks according to ECT in directed FC-ER networks (a) and undirected FC-ER networks (c). ET of undirected FC-SF networks (b) and directed FC-SF networks (d) could be estimated according to Eqs. (10) and (12), respectively. The theory of FC-ER networks and FC-SF networks corresponds to the analytical results of Eqs. (6) and (9) for undirected situations, and Eqs. (7) and (11) for directed situations. The results of MMT and ET are averaged over 100 independent realizations for N=1000, over 50 independent realizations for N=2000, and over 10 independent realizations for N=5000. We use the original key parameters controlling ⟨k⟩ instead of ⟨k⟩ itself, p=⟨k⟩/N in ER random networks (a), (c) and m=⟨k⟩/2 in SF networks (b), (d), to show the relativity between the average degree and nD, respectively.
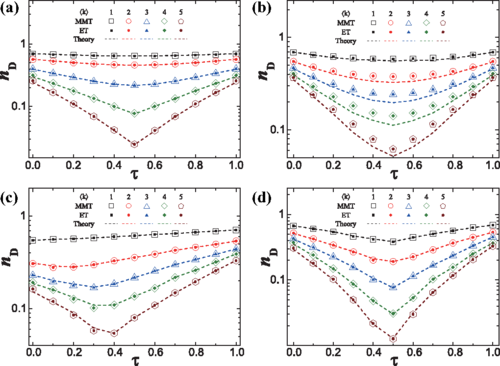
Figure 3
(a)–(d) nD as a function of the link directionality (τ) for directed ER (a),(c) and directed SF (b),(d) networks. nD is shown as a function of τ for ER and SF networks without the flow-conservation dynamics (a),(b) and for FC-ER and FC-SF networks (c),(d). The results of the networks with different average degree are shown. ET of networks without the flow-conservation dynamics (a), (b) could be estimated by nETD=max {1/N, rank (A)/N}, and ET for the flow-conservation networks (c), (d) is computed by Eq. (14). Theory denotes the results obtained from the graphical approach [13]. The sizes of networks are all 2000 in (a)–(d). The results from MMT and ET are averaged over 20 independent realizations, and those from theory are averaged over 100 independent realizations. The notations in this figure are the same as in Fig. 2.
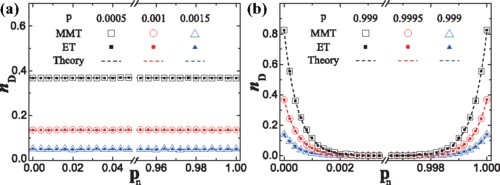
Figure 4
The impact of the negative link ratio on nD in sparse situations (a) and dense situations ( b) of directed FC-ER networks, with different average degrees ⟨k⟩ (⟨k⟩=Np). ET of networks could be estimated by the origin equations in ECT for sparse networks (a) and Eq. (16) for dense networks (b). Theory denotes the results obtained from the analytical Eq. (7) for the sparse (a) and Eq. (15) for the dense (b). The simulated networks' sizes are all 2000. The results of MMT and ET are averaged over 50 independent realizations.
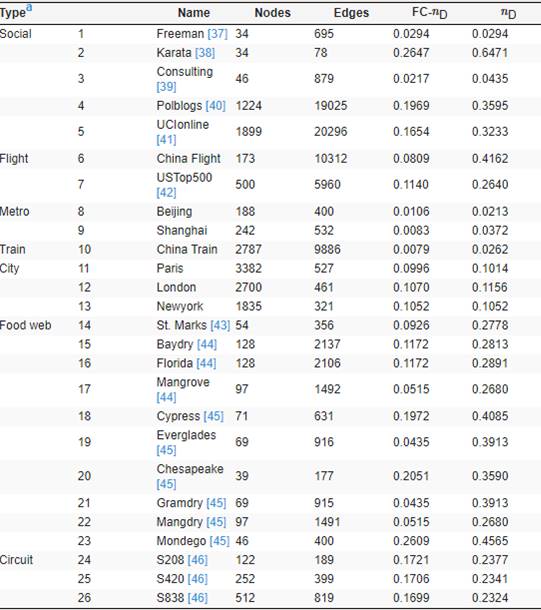
TABLE I
Empirical networks with flow-conservation dynamics. The traditional topological controllability is denoted as nD and the controllability of the network with flow-conservation dynamics is symbolized by FC-nD.
a The empirical networks are calculated with identical weighted links. All the above networks have the flow-conservation property, and we just use their topology to confirm the important role of the flow-conservation dynamics. Except for the the cited data, other data are were taken from the internet and cleaned by ourselves.
邮箱:sss@bnu.edu.cn 邮编:100875 地址:北京市海淀区新街口外大街19号 学院联系电话:(010)58807880
bat·365(中文)官方网站(官方)EuroCup/下单平台 版权所有

院微信公众号

BNU系统学工